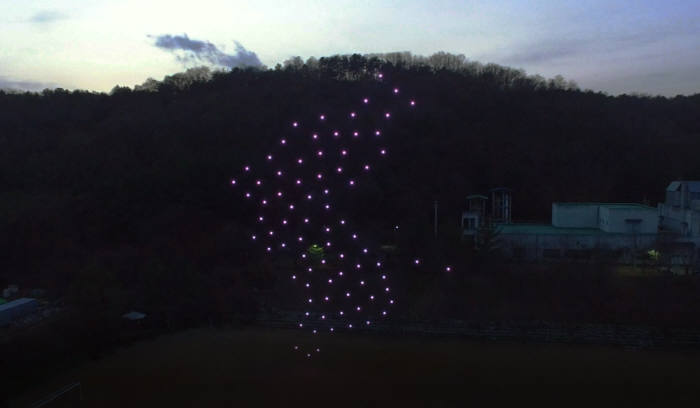
국내 연구진이 드론의 위치 정보를 와이파이 방송 형태로 방출하고, 이를 개별 드론이 받아 비행 정보를 담은 내부 프로그램과 연동해 다양한 유형으로 비행하도록 하는 대규모 드론 군집비행 제어 기술을 개발했다.
한국항공우주연구원(원장 임철호)은 인공지능연구실이 각각의 드론에 내부 프로그램을 담아 스스로 움직이게 하고, 위치 정보를 방송처럼 송출해서 감지하도록 하는 '분산형 시스템'을 개발, 이론으로는 드론을 무제한 군집 비행할 수 있도록 제어하는 새로운 개념의 군집 비행 기술을 개발했다고 10일 밝혔다.
이번에 개발한 기술은 중앙 시스템으로 모든 드론 움직임을 제어하는 기존 '중앙 집중형 시스템'에서 벗어나 드론에 내장한 프로그램대로 움직이도록 한 '분산형 시스템'을 구현한 것이 핵심이다. 기존 중앙 집중형 시스템은 드론마다 많은 움직임 정보를 전달해야 하기 때문에 초고속 통신망을 사용하고도 비행 대수를 늘리기 어려웠다.
반면에 분산형 시스템 드론은 이미 내부에 비행 궤적을 담고 있다. 군집 비행에 필요한 외부 수신 정보량이 극히 적다. 드론이 정확한 자기 위치를 파악하도록 돕는 '보정 신호' 정보만 전달하면 된다. 연구팀은 보정 신호를 각 드론에 개별 전달하지 않고 와이파이로 보내는 방법을 사용했다. 비행에 필요한 필수 정보를 이전보다 훨씬 더 많은 드론에 전달할 수 있게 됐다.
보정신호는 보통 GPS보다 정확도가 월등한 '실시간 이동측위 위치정보시스템'(RTK-GPS)으로 생성했다. RTK-GPS는 지상에 설치한 고정형 안테나를 이용해 위성에서 받은 GPS 신호 오차를 쉽게 파악할 수 있는 시스템이다.

연구팀은 이번 드론 군집 비행 기술이 세계 기술력을 갖춘 인텔에 비견되는 성능이라고 설명했다. 이론상 대수 제한 없이 군집 비행이 가능하고, 드론 위치 오차도 센티미터(㎝) 수준이다. 드론 제어 시스템에 오픈소스 소프트웨어(SW)를 활용, 기업이 쉽게 응용할 수도 있다.
항우연은 올해 안에 이 기술을 활용한 대규모 드론 시연도 준비하고 있다. 이미 기술 적용 드론 80대를 준비한 상황으로, 이달 중 30대를 추가 확보할 예정이다.
문성태 항우연 인공지능연구실 박사는 “항우연이 개발한 드론 군집 비행 기술은 실종자 탐색을 비롯해 다양한 분야에 활용할 수 있다”고 말했다.
대전=김영준기자 kyj85@etnews.com