






포항산업과학연구원(RIST 원장 류경렬) 설비자동화연구센터(센터장 최진태)는 지능로봇이 실내 공간을 이동하면서 자신의 위치를 인식하는 근적외선 영상방식 위치인식센서(모델명: StarGazer)를 개발했다고 13일 밝혔다.
이번에 개발된 센서는 실내공간에서 움직이는 이동로봇의 위치를 결정하기 위해 근적외선 랜드마크(로봇에 발사한 근적외선을 선택적으로 반사시키는 인식표지) 영상을 이용했다.
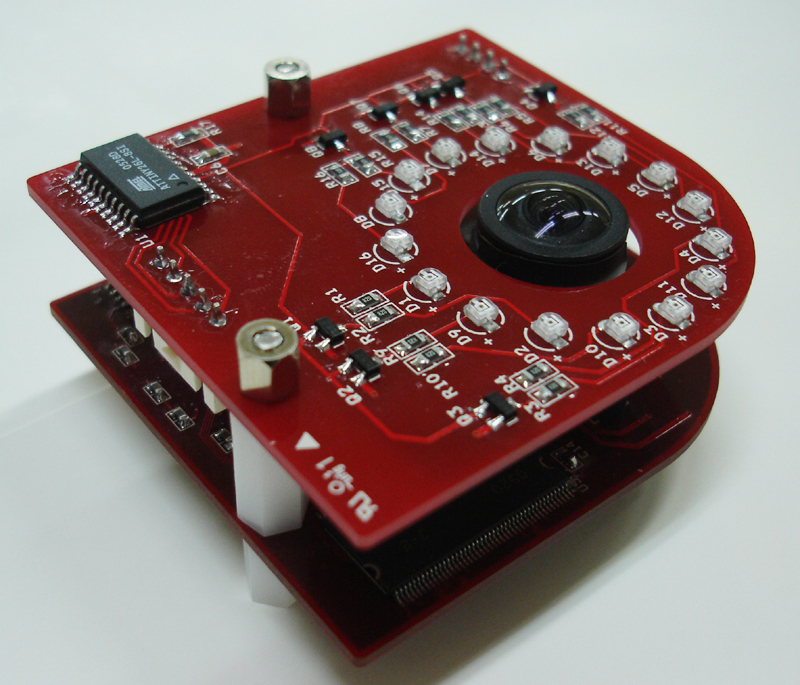
실내의 천정이나 벽면에 부착된 인식표지에 근적외선을 방사한 후 근적외선 카메라로 촬영하면 야간의 별자리와 같은 영상물을 획득하게 되고, 로봇은 영상처리 기법에 의해 자신의 위치를 계산하게 된다. 센서는 근적외선 방사모듈과 랜드마크, 근적외선 카메라 등으로 구성돼 있다.
이 센서는 특히 기존 위치인식 센서의 단점인 높은 가격과 위치계산 착오 등 문제를 해결, 현재 청소로봇을 비롯한 실내 서비스 로봇의 지능과 기능을 한 단계 업그레이드시킬 것으로 기대된다.
RIST는 이번 기술개발과 관련 근적외선에 의한 로봇 위치인식 등 4건의 특허를 출원했다.
최진태 센터장은 “현재 청소로봇은 자신의 위치를 몰라 무작위 위치이동을 하면서 청소를 하고 있지만 이 센서를 적용할 경우 공간상 청소를 한 곳과 안 한 곳을 구별할수 있어 청소로봇 기술 발전의 기폭제 역할을 할 것”이라고 말했다.
포항=정재훈기자@전자신문, jhoon@