






KAIST 기계공작실 1층에 위치한 10×15m 크기의 수조. 물이 출렁거렸지만 움직이는 항구 ‘모바일 하버’의 도킹과 하역은 한치의 오차도 없이 정확히 이루어졌다. 실현 가능성에 대한 논란으로 내년 예산 확보에 애를 먹고 있는 프로젝트였지만, 실험은 완벽했다.
KAIST 모바일하버 사업단(단장 곽병만)이 15일 ‘모바일 하버’의 화물 선적 및 하역과 도킹에 대한 시연회를 개최했다. 시연회는 최근 논란을 빚고 있는 모바일 하버의 기술검증을 위해서 실시됐다.
모바일하버는 수심이 깊은 해상에 정박 중인 컨테이너선과 수심이 낮은 항구를 연결하는 새로운 해상 컨테이너 운송 수단으로 KAIST·서울대·울산대·한국기계연구원·해양수산개발원 등이 지난 1년간 원천기술 개발에 매달려 왔다.
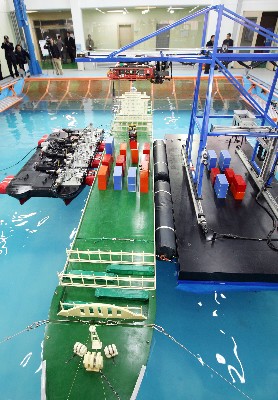
시연회에서는 최대 파고 2∼3m의 해상 조건에서 25분의 1크기로 축소한 모바일하버가 컨테이너를 옮겨 싣는 모습과 도킹 등이 연출됐다.
컨테이너를 옮기는 고속하역시스템부터 시연했다. 메인 시스템이 모바일하버 크레인의 기울어진 각도를 측정한 뒤 트롤리 및 스프레더의 자세를 안정화한 다음 컨테이너의 정확한 위치를 찾아 하역하는 방식으로 진행됐다.
모바일하버의 컨테이너선과의 도킹은 로봇 팔과 윈치, 펜더로 구성된 도킹시스템을 이용해 자동으로 이루어졌다. 진공압착고무 4개가 일정한 속도로 다가와 모선에 붙인 뒤 와이어가 잡아주면 웬만한 출렁거림에는 무난하다는 것이 연구진의 설명이다.
기계연은 모바일하버의 좌우 움직임을 줄이는 ‘동조형 감요탱크와 제어장치’, 서울대는 분리형 모바일하버용 가상 시뮬레이션 시스템, 울산대는 고속 하역시스템과 선박접안장치, 부유체 안정화 장치 등을 선보였다.
KAIST는 이번 시연으로 그동안 학계에서 제기한 기술 실현 가능성에 대한 우려를 씻어내고, 실용화를 위한 진전을 이뤘다고 자체 평가했다.
모바일하버 사업단은 현재 파나마운하 확장공사에 따른 미국 동부항만과 푸에르토리코 등 중남미 지역, 정부 및 민간자본의 매칭 펀드를 활용한 인천·연안물류사업에 모바일하버 공급이 가능할것으로 보고 있다.
곽병만 모바일하버사업단장은 “새로운 항만 건설이나 증설없이 컨테이너 수송 수요에 대처할 수 있는 대안”이라며 “중국에 추월당하고 있는 국내 조선산업 분야에서 신시장 창출과 선점을 통한 국가 경쟁력 강화에 크게 기여할 것”이라고 말했다.
서남표 KAIST 총장은 “세상에서 처음으로 하는 일에는 으레 말이 많기 마련”이라며 “에너지를 덜쓰고 덜 움직이는 방법으로 움직이는 항구를 만들어 공해와 이산화탄소 문제 등을 해결하자는 것”이라고 말했다.
대전=박희범기자 hbpark@etnews.co.kr