






점프를 하고 하늘을 날 수 있는 미니 로봇이 개발됐다. 이 로봇 개발에는 바이오 생체 메카니즘이 활용됐다.
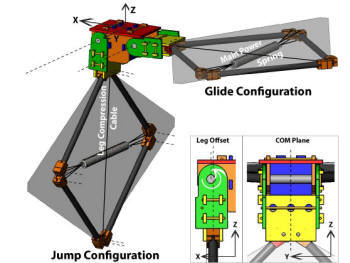
IT매체인 엔가짓에 따르면 미국 카네기멜론대학 부설 나노로보틱스랩 소속 매튜 우드워드와 매틴 씨티 연구원은 바이오 생체 메커니즘을 활용해 점프하고 하늘도 날수 있는 로봇의 시제품을 개발했다. 무게 100그램이 채 안되는 이 미니 로봇은 사람의 무릎 관절처럼 웅크린 다음 껑충 뛸 수 있으며, 다리를 펼쳐 글라이더 처럼 하늘을 날 수도 있다. 이 로봇은 두개의 ‘4-bar(스프링과 네 개의 막대로 구성)’ 메커니즘과 바디로 구성되어 있다. 이 ‘4-bar’ 메커니즘 두개가 각각 다리와 날개 역할을 수행한다.
현재 개발된 미니 로봇은 6피트 정도 뛸 수 있다. 웅크리는 동작을 통해 에너지를 축적한 다음 도약할 수 있는 것. 이어 다리를 편 다음 글라이더 처럼 비행할 수 있다. 개발팀은 이 로봇을 전쟁터처럼 불규칙한 지면을 갖고 있는 장소에서 사용할 수 있도록 개발 중이다.
하지만 시제품 단계여서 몇가지 기능상 결함이 있다. 우선 한번 도약 후 2차 도약을 하지 못하며, 비행 중에 나무나 거미줄에 걸리면 헤어나기 힘들다는 것. 이런 문제들이 해결되면 기존 소형 비행 로봇을 대체할 수 있을 것으로 예상된다는 게 전문가들의 시각이다. 홍보 동영상을 보면 일반인들이 이해하기 쉽도록 크게 에너지 축적 단계, 코스트(Coast) 단계, 글라이더 비상 단계를 개념도 형태로 보여주고 이어 로봇 시연 장면을 보여주고 있다. 하지만 아직 완벽한 시연 장면이 아니라는 게 아쉽다.
카네기멜론대 개발팀은 이달 25일 샌프란시스코에서 열리는 로봇 국제 컨퍼런스인 ‘IROS 2011`에 이 미니 로봇을 선보일 예정이다.
이 로봇에 관한 홍보 동영상은 http://www.youtube.com/watch?v=A8X9ULBTPdA&feature=player_embedded , http://nanolab.me.cmu.edu/projects/MultiModalLocomotion 를 참고하면 된다.
장길수기자 ksjang@etnews.com