






손목의 뻣뻣한 정도를 정확하게 측정, 뇌졸중 환자 진단과 재활 치료 효과를 높일 수 있는 재활로봇이 개발됐다.
강상훈 울산과학기술원(UNIST) 기계항공 및 원자력공학부 교수는 손목과 아래팔의 경직도를 측정해서 수치화할 수 있는 'dIMBIC 기반 기법'과 이 기법을 적용한 지능제어 재활로봇을 개발했다고 1일 밝혔다.
이 재활로봇은 지능 제어와 진단용 시스템 식별 기능을 갖춰 뇌졸중을 비롯한 신경 질환의 정량 및 객관 진단 보조 장치로 활용할 수 있다.
기존의 뇌졸중 진단 및 치료는 의사나 임상전문가의 경험, 감각에 의존했다. 환자의 관절을 움직여 보고 주관으로 자동 반응 저항 정도를 판단하면 진단 결과가 달라질 수 있다. 한 번에 한 관절, 한 방향의 자동 반응 저항만 측정·평가할 수밖에 없다는 한계도 있었다.

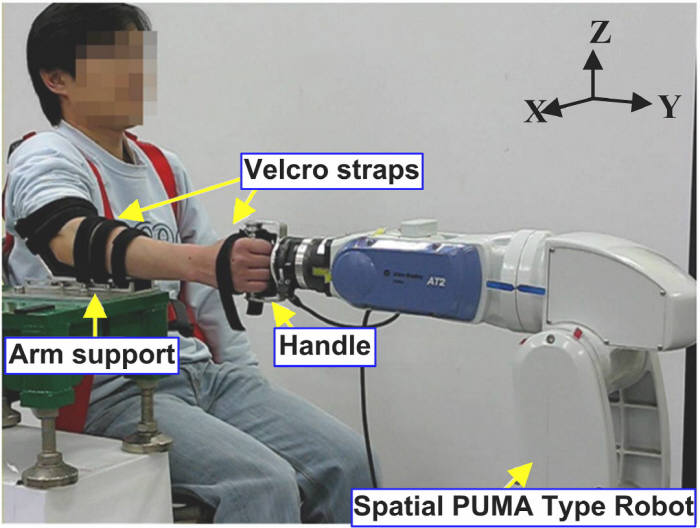
강 교수의 재활로봇은 마사지 기계처럼 환자의 손목과 아래팔에 진동을 가하고 이 진동에 따른 반동, 즉 자동 반응 저항값을 수치로 파악한다. 손목과 아래팔의 자동 반응 저항을 여러 방향에서 측정할 수 있어 종합 진단도 가능하다.
강상훈 교수는 “기존의 재활로봇을 더욱 정밀하게 제어할 수 있는 지능 기술”이라면서 “산재병원, 재활병원 등에 도입하면 환자 및 장해 맞춤형 로봇재활 시대를 여는데 크게 기여할 수 있다”고 설명했다.
울산=임동식기자 dslim@etnews.com

