






제조현장에 속속 투입되고 있는 로봇. 하지만 아직 발전의 여지가 많다. 우선 업무 목표 아래 펼쳐지는 다양한 상황에 스스로 판단·대응할 수 없다. 업무 반경이 제한돼 있고 프로그래밍 된 동작 외에는 구현할 수 없다. 효과적인 활동을 위해서는 인간이 개입해야 한다. 4차 산업혁명, 스마트공장 시대의 주역으로 거듭나기 위해서는 많은 개선점이 요구된다.
인공지능(AI)을 비롯한 첨단 기술이 로봇, 미래 제조현장에 새로운 변환점을 제시한다. 기술 발전은 로봇이 다양한 돌발 상황에 대처할 수 있도록 돕는다. 뜻하지 않은 장애물이 발생해도 수월하게 문제를 해결, 작업을 재개한다. 안전성 문제로 불가능했던 인간과 협업도 높은 상황 대처 능력으로 가능하게 한다. 생산 수율 극대화, 로봇과 인간이 공존하는 4차 산업혁명 시대의 스마트공장을 현실화 한다.
제조로봇은 제품 생산에서 출하까지 모든 공정을 수행하는 로봇이다. 자동으로 제어되고 공정 재프로그램이 가능해 생산성을 극대화하는 방편이다.
제조로봇 시장은 최근 급격한 성장을 거듭했다. 2015년 25만4000대에 달하는 제조로봇이 세계 공장에 보급됐다. 최대 사용처인 자동차 부품 및 전기·전자 분야에서 급격한 자동화가 이뤄져 보급 확대를 견인했다. 중국, 일본, 미국, 한국, 독일 등 전체 시장의 70%를 차지하는 주요국이 이들을 수용했다.
4차 산업혁명 시대는 이런 제조로봇 확산 추세에 속도를 더해줄 것으로 기대된다. 그동안 로봇 도입에 미온적이던 생산시설에도 생산수율 확대와 효율성 제고를 위해 적극 도입할 것으로 보인다. AI와 정보통신기술(ICT)으로 무장한 지능형 제조로봇이 생산의 주역으로 거듭날 전망이다.
KAIST(총장 신성철)도 올해부터 제조로봇 기술 개발에 착수했다. 연구혁신 일환으로 '스마트·공장용 지능형 제조로봇 기술 개발'에 뛰어들었다. 4차 산업혁명 시대의 새로운 제조환경에 사용할 수 있는 로봇 기술 개발에 박차를 가한다.
'휴보'를 개발해 로봇 관련 기술력을 세계에 입증한 오준호 휴머노이드 로봇 연구센터 소장을 필두로 윤성의 전산학부 교수, 박현섭 기계공학과 교수 등이 힘을 모은다.
오준호 소장은 휴보 개발 노하우를 살려 제조로봇 하드웨어 및 제어기술 확보에 나섰다. 윤성의 교수는 로봇이 효과적으로 자율 구동할 수 있는 '작업지능'을, 박현섭 교수는 통합 운용체계(OS)를 구축한다.
연구팀의 첫 번째 목표는 인간과 같은 공간에서 '협업'할 수 있는 제조로봇 개발이다. 단일화된 자동화 체제보다는 여러 환경에 대처할 수 있을 때 제조로봇의 활용도가 높아진다는 판단이다. 기존 제조로봇은 인간과 같은 공정에서 일할 수 없었다. 크고 무거워 공장 내 많은 공간을 차지했다. 별다른 안전장치가 적용되지 않아 안전사고 위험도 컸다.
제조로봇을 도입하려면 공정 모두를 로봇화 해야 했다. 비용부담이 커 상대적으로 작은 시설에서는 도입을 꺼릴 수밖에 없다. 실제로 세계 제조로봇 70% 이상이 대규모 자동차 및 전기전자 분야에 편중돼 있다. 다양한 제조 분야, 공장 규모에 상관없이 로봇이 적용돼야 미래 '생산 혁신'을 구현할 수 있다.
연구팀은 로봇이 인간과 함께 공정을 수행할 수 있도록 다양한 핵심 기술을 개발하고 있다. 첫 번째는 충돌 시 인간이 부상을 입지 않도록 하면서 스스로의 고장도 막는 '직렬 탄성 엑추에이터' 기술이다.
모터 축에 탄성이 있는 폴리머 소재를 넣는 것이 핵심이다. 폴리머 소재는 기계 내부에서 외부의 충격을 완화시키는 역할을 한다. 외부의 힘을 감지하는 센서 역할도 맡는다. 폴리머 소재가 외부의 힘에 찌그러지면 그 정도를 계산해 적절한 반응 수준을 결정하게 한다. 이 기술이 적용되면 로봇이 뜻하지 않게 부딪혀온 인간 작업자에 반응해 충격을 흡수하고 즉각 작업을 멈춘다. 작업자가 접촉하지 않는 것이 확인된 후 다시 업무에 복귀한다.
두 번째 목표는 스마트 로봇 개발에 필수적인 작업지능 기술을 개발하는 것이다. 윤성의 교수, 강민철 석사과정은 제조로봇의 작업 움직임을 최소화 하는 '자동 작업경로 생성' 기술을 개발하고 있다. 미리 학습시킨 작업 목표를 기반으로 로봇의 이동 경로를 만들어 낸다. 작업의 우선순위에 따라 행동하는 '테스크 플래닝' 기술이 특징이다. 작업 도중에 장애물이 인지되면 장애물 처리를 우선순위에 둬 작업이 물 흐르듯 진행되게 한다. 여기에 로봇이 다른 물체와 충돌하지 않으면서 최단 거리로 작업하게 하는 '모션 플래닝' 기술도 함께 접목했다.
제조로봇의 경량화, 소형화도 주된 연구 주제다. 공정에 손쉽게 제조로봇을 적용하고 인간과 협업을 이루기 위한 필수과제다. 오준호 소장을 비롯한 연구팀은 모터를 최적화 설계해 로봇의 부피와 무게를 줄이는데 힘을 기울이고 있다. 궁극적으로는 사람이 들어서 움직일 수 있는 제조로봇 구현이 목표다.
오준호 소장은 “4차 산업혁명 시대의 제조 혁신에서 우위를 차지하기 위해서는 지금의 자동화 로봇에 협업의 가치, 더욱 스마트한 지능을 담아야 한다”면서 “보다 안정성과 작업지능을 높인 로봇 구현에 최선을 다하겠다”고 말했다.
<세계 제조 로봇 공급대수 현황 및 전망, 단위:대, 자료: IFR 2016>

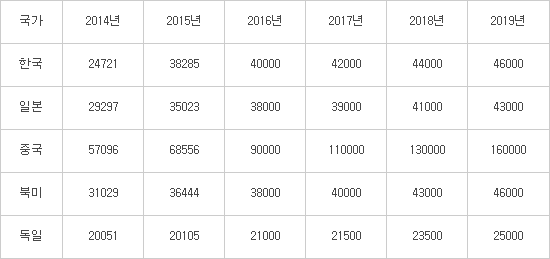
<세계 주요국 및 지역 제조 로봇 공급대수 현황 및 전망, 단위:대, 자료: IFR 2016>
<2015년 산업별 세계 제조로봇 적용대수, 단위:대, 자료: IFR 2016>

<세계 제조용 로봇시장 규모(매출액), 단위:백만불>

대전=김영준기자 kyj85@etnews.com

