






“사람과 함께 안전하게 일하고, 간편하게 공정을 학습하는 새로운 로봇이 곧 나오게 됩니다.”
KAIST '휴보랩' 내 로봇 개발 공간. 2015년 세계재난로봇대회(DRC) 우승의 영광을 일궈낸 이곳에서는 미래를 선도할 또 다른 로봇이 차츰 모습을 갖춰가고 있다. 아직 부분적인 기술과 로봇 부위만 만들어져 있지만, 이것만으로도 4차 산업혁명을 선도할만한 잠재력을 엿볼 수 있다.
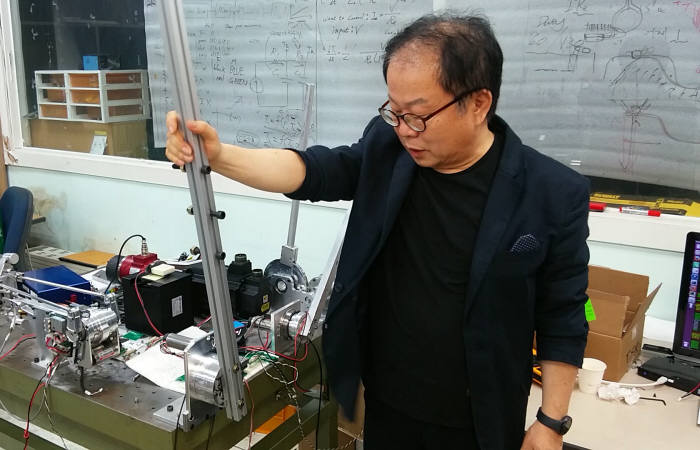
공간 내부에서는 오준호 휴머노이드 로봇 연구센터 소장이 몇몇 학생들과 제조로봇 구동부를 매만지는데 여념이 없었다. 주변의 수많은 컴퓨터와 로봇 부품들은 연구가 얼마나 격렬하게 이뤄지는지를 대변하는 듯 했다.
오 소장은 기자에게 한창 개발 중인 제조로봇 안전시스템을 보여줬다. 인체가 로봇에 부딪히면 충격을 흡수하고 그동안의 동작을 순식간에 멈추는 기술이 반영됐다. 지금은 주먹만한 크기의 모터가 책상에 고정되고 로봇팔을 모사한 철제 프레임만 구현된 형태였다. 하지만 기술의 진면목을 보기에는 충분했다.
“다른 작업자가 밀거나 부딪히면 모터가 힘의 방향대로 충돌 부위를 움직입니다. 외부의 운동에너지를 상쇄시키는 겁니다.”
그동안의 로봇은 충돌 시 자신의 위치를 고수한다. 마치 벽에 부딪히는 것처럼 충돌자에게 고스란히 충격을 안겨준다. 오 소장은 이 시스템을 로봇에 적용하면 인간과 같은 공간에서 일해도 사고를 방지할 수 있다고 강조했다.
오 소장의 권유에 따라 힘을 가하자 즉각 프레임이 움직였다. 프레임은 작은 모터 작동음이 들리면서 힘이 가해지는 방향을 따라 고개를 기울였다. 사람이 모터 내부에 장치된 폴리머 소재가 외부에서 오는 힘의 방향, 세기를 감지해 적절한 반응을 부른다는 설명이다. 프레임은 기자가 손을 떼자 다시 원위치로 돌아왔다. 오 교수를 돕던 한 학생이 '주어진 작업에 복귀하는 것'이라고 귀띔해 줬다. 외부의 힘이 사라지고 주변 작업자의 안전이 확인되면 자동으로 본연의 업무에 나선다는 것이다.
오 소장은 이후 휴보를 통해 새롭게 개발하고 있는 공정 학습 방법을 보여줬다. 공정 학습은 로봇을 조정하면서 각 부위의 위치 정보, 이동 순서를 기억하게 하는 방식이다. 먼저 기존 방식의 시연이 이어졌다. 조종기로 로봇을 조작하는 방법을 썼다. 휴보의 손가락으로 원을 만드는 것이 목표였는데 시간이 적지 않게 걸렸다. 여러 부위에 각각 명령을 내려야 해 조종에 미숙한 사람이라면 미세 조정이 어려워 보였다.
“명령을 통해 로봇을 조종하는 것은 숙련자도 시간이 많이 걸립니다. 반면에 각 부위를 손으로 잡아 움직인다면 세밀함을 더할 수 있습니다.”
오 소장이 로봇의 팔을 잡아 위로 힘을 가하자, 역시 작은 모터 구동음이 들려오면서 손쉽게 들렸다. 로봇의 두 팔을 일렬로 만들고 손가락으로 원형을 만드는데 채 10초가 걸리지 않았다. 실제 공장에 적용되면 복잡한 과정 없이 누구나 로봇의 움직임을 프로그래밍하는 것이 가능해진다. 여기에도 역시 외부의 힘을 미세하게 감지하는 기술이 적용됐다.
오 소장은 이들 기술이 끝이 아니라고 했다. 제조로봇을 모든 공장에 보급하고 4차 산업혁명 시대의 주역으로 만들기 위해서는 보다 다양한 기술 개발이 필수적이다.
그는 “지금은 시작단계에 불과하지만 곧 제조 로봇의 동작 효율성, 안전성, 간편성을 더하는 기술을 계속 마련하고 있다”면서 “지능형 제조로봇이 4차 산업혁명의 주역이 될 것”이라고 말했다.
대전=김영준기자 kyj85@etnews.com

