






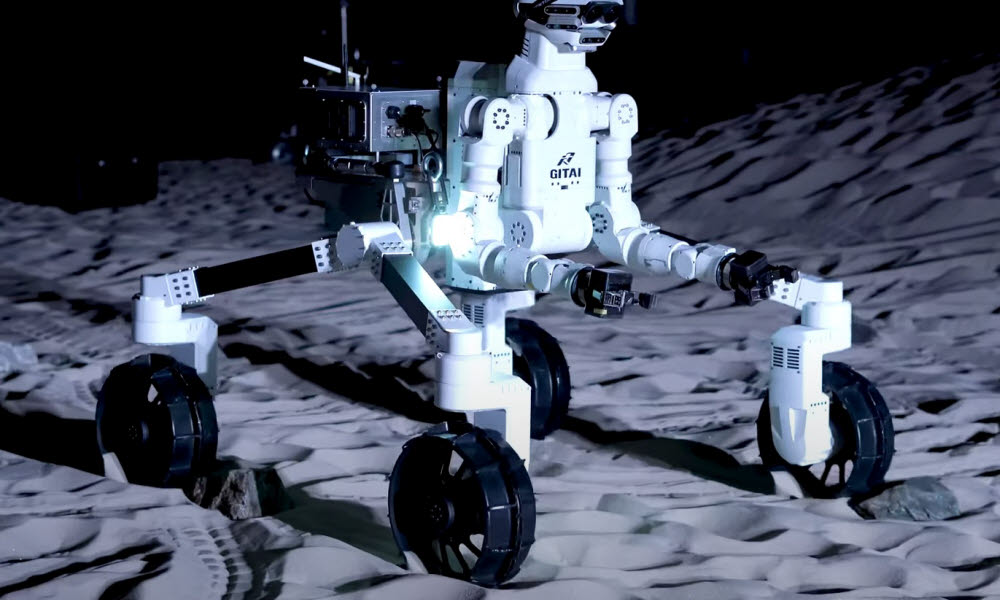
일본 우주로봇 스타트업 기타이(Gitai)가 최근 우주 탐사용 다목적 로버(Rover)인 'R1'을 개발했다고 밝혔다. 이번에 기타이가 개발한 R1은 달 표면을 이동하면서 탐사·채굴·검사·조립작업 등의 다양한 작업을 수행하는 지능형 로봇이다.
기타이는 작년 12월 일본우주항공연구개발기구(JAXA)의 사가미하라 캠퍼스에 마련된 달 표면 모의 환경에서 R1의 주행 시험과 복수의 작업 수행을 테스트하고 관련 동영상을 공개했다.
이번 모의 테스트에서 기타이는 4가지 분야에서 로버의 성능 시험을 실시했다고 밝혔다. 시험은 주행·이동·장애물 회피. 태양전지판 조립 시험, 달 표면 자원 채취 시험, 경사면(사구) 주파 시험 등 4가지 분야에서 진행됐다.
R1은 전방위 이동이 가능한 바퀴를 탑재, 유연한 이동이 가능하다. 이 로봇은 모의시험에서 수십 cm의 바위를 뛰어넘고, 장애물을 회피하면서 자유로운 이동이 가능하다. 또 태양광 패널이나 안테나 등 태양광 부품을 화물 컨테이너에서 꺼내 목적지로 운반하고, 조립하는 모습을 시연했다. 자원 채취용 도구를 컨테이너에서 꺼내 달 표면에 있는 모래를 채취하고, 정해진 위치에 운반하는 모습도 보여줬다. 또 경사 15~20도의 모래 언덕을 등정하기도 했다. 기타이는 2025년 전후 실제 달 표면에서 실제 로버를 시연할 계획이라고 밝혔다. 기타이 측은 앞으로 우주 비행사가 우주로 보내기 위해선 큰 비용과 훈련 시간이 필요할 것으로 보고, 비용 부담이 상대적으로 적은 원격 제어 로봇의 수요가 증가할 것으로 전망했다. 기타이는 현재 JAXA와 공동 연구 중이다.
박태준기자 gaius@etnews.com