






국내 연구진이 로봇을 이용해 비대면 방식으로 피검자로부터 검체를 채취하는 시스템을 구현했다. 채취 전후 과정을 자동화해 속도까지 더했다.
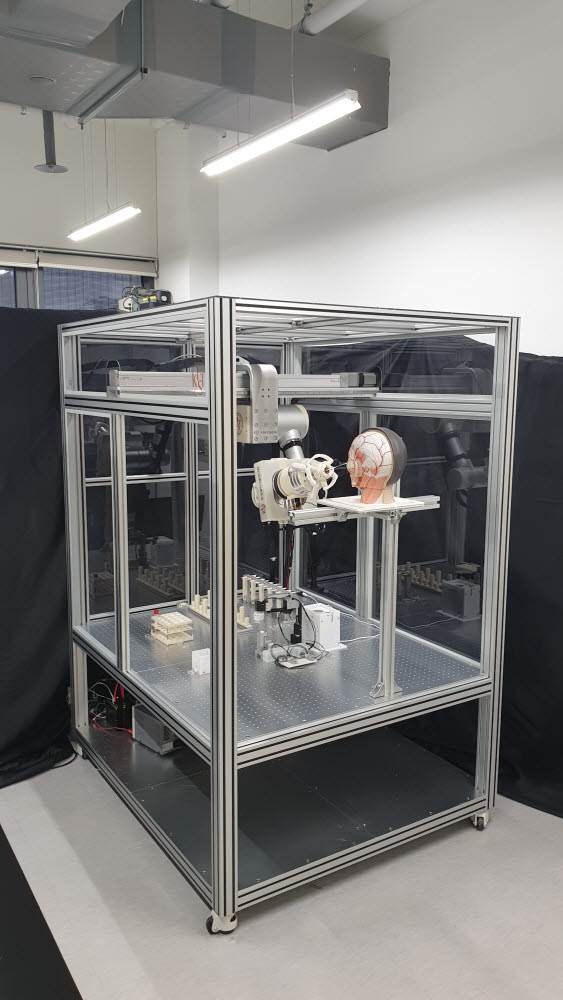
한국과학기술연구원(KIST)의 김계리 안전증강융합연구단 책임연구원이 김정률 AI로봇연구소 선임연구원과 이룬 성과다. 시스템은 독립된 부스 형태로 갖가지 요소를 갖췄다.
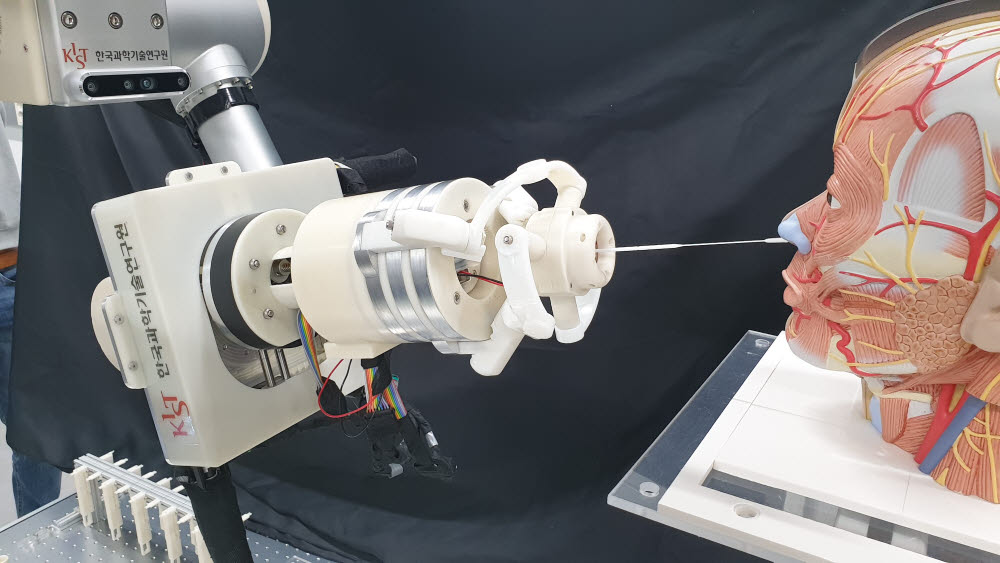
로봇 암이 핵심 요소고 바이러스 수송 배지(UTM)와 면봉을 담은 모듈, 매번 인체 접촉부를 소독하는 스테이션 등으로 구성된다.
높은 자동화율, 완벽한 의료진·피검자 간 분리가 특징이다. 로봇 암으로 잡은 면봉이 피검자와 닿는 '근접 상황'만 자동화 없이 외부 원격 조정으로 작동한다. 이 밖에 로봇이 피검자에게 다가가거나 면봉과 UTM을 집는 등 전 과정이 자동화됐다. 덕분에 기존보다 훨씬 짧은 시간에 검체 채취가 가능하다. 의료진 안전도 담보한다. 사람이 개입할 여지가 극히 적은 만큼 감염 위험이 적을 수밖에 없다.
로봇 팔, 특히 세밀한 움직임을 담당하는 끝부분 '엔드 이펙터'에 많은 기능·특성을 담았다. 딥러닝 학습 모델을 활용, 엔드 이펙터가 채취 위치까지 최적의 경로로 움직이도록 했고 힘 센서를 적용해 면봉이 일정 깊이 이상 들어가지 않게 했다.
엔드 이펙터의 물건을 집는 부위인 '그리퍼'도 특징이다. 통상 그리퍼는 대상 하나를 집는데 최적화돼 있다. 하지만 이번 결과의 그리퍼는 2㎜대 면봉, 20㎜ 수준의 UTM을 모두 다룰 수 있다. 덕분에 검체 채취와 전·후 과정 모두 로봇 암 하나만으로 자동화할 수 있다.
연구진은 시스템 시작품 제작을 마친 상태로 개발이 완료되면 이를 국내 대형병원 감염관리센터에 도입하는 것이 목표다. 검체 채취 시 환자 고통을 줄이는 연구도 염두에 두고 있다.
김계리 책임은 “불편한 방호복 속에서 고통받는 의료진이 더욱 쉽고 안전하게 국민 안전에 기여할 수 있도록 하는 것을 목표로 기술을 개발했다”며 “로봇 장치를 추가해 의료 사각지대 원격의료에도 시스템을 활용하는 등 스핀오프도 가능하다”고 말했다.
한편 이 시스템은 안전증강융합연구단(단장 김상경) 연구 활동 성과다. 이 연구단은 의료시스템 지원기술, 산업현장 중대사고 예방 연구를 하는 곳이다. 특히 팬데믹 대응에 치중한다. 또 다른 감염병 위기에 국가적 대비가 필요한 가운데 관련 연구에 힘쓰고 있다.
김영준기자 kyj85@etnews.com

