






한국과학기술원(KAIST·총장 이광형)은 노용만 전기 및 전자공학부 교수팀이 물체를 검출하는 딥러닝 신경망에 대한 적대적 공격을 방어하는 알고리즘을 개발했다고 15일 밝혔다.
딥러닝 신경망 기술은 자율주행과 물체검출 등 다양한 분야에서 핵심기술로 주목받고 있는데 현재 딥러닝 기반 검출 네트워크는 입력 이미지에 적대적 패턴을 주입해 잘못된 예측 결과를 초래하는 식으로 공격할 수 있다. 인위적 패턴이 포함된 물체는 검출되지 않게 하는 적대적 패턴 공격이 가능하다.
딥러닝 기반 모델을 국방이나 의료 및 자율주행 등에 적용할 때 문제가 된다. 국방 감시정찰 분야에서 적군이 적대적 패턴으로 위장·침입하면 검출을 못 하는 경우가 발생할 수 있다.
기존 연구는 추가로 복잡한 모듈이 필요하거나 다시 학습해야 해 실시간 작동하는 알고리즘에 쓰기 어려웠다.
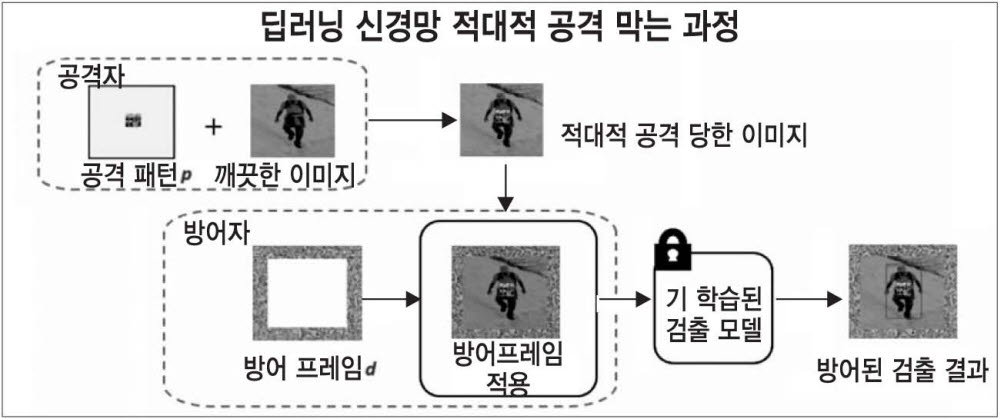
연구팀은 적대적 패턴 공격 원리를 반대로 이용해 학습된 네트워크에 접근하지 않으면서 입력단에서 방어할 수 있는 방어 프레임 기술을 고안했다.
적대적 공격과 정반대로 물체 검출 시 딥러닝 모델이 옳은 예측 결과를 내리도록 하는 것이다. 창과 방패의 싸움처럼 적대적 패턴과 함께 경쟁적으로 학습되며 이 과정을 반복해 모든 적대적 패턴 공격에 높은 방어성능을 지니도록 최적화했다.
연구팀은 입력 이미지 외부에 덧붙이는 방어 프레임을 변화시켜 손쉽게 방어성능을 조절할 수 있음을 확인했다. 개발 방어 프레임은 인리아(INRIA) 검출 벤치마크 데이터셋에서 기존 방어 알고리즘 대비 평균 31.6% 정확도가 향상됐다.
개발 방어 프레임은 실시간 물체 탐지 시 모델 재학습 없이 적대적 패턴 공격을 방어할 수 있으므로 예측 시간 및 비용 절감을 크게 이룰 수 있을 것으로 기대된다.
노용만 교수는 “이번에 개발된 방어 기술은 인공지능(AI) 모델 적용 시 실용적인 적대적 방어를 제시한 것”이라며 “국방 감시정찰, 보안, 자율주행 분야에 적용될 수 있을 것”이라고 말했다.
공동 제1 저자인 유영준, 이홍주 KAIST 전기 및 전자공학부 박사과정 학생 등이 함께 수행한 이번 연구는 영상처리 분야 최고 국제 학술지인 'IEEE 트랜스액션즈 온 이미지 프로세싱'에 지난 1일 자 온라인 게재됐다.
한편 이번 연구는 방위사업청과 국방과학연구소(ADD) 지원으로 KAIST 미래국방 인공지능 특화연구센터에서 수행됐다.
김영준기자 kyj85@etnews.com

