






한국과학기술원(KAIST·총장 이광형)은 장영재 산업 및 시스템공학과 교수팀과 KAIST 연구소 창업기업인 '다임리서치'가 공동 개발한 연구가 반도체 운영 관련 국제적인 저널인 'IEEE TSM'에서 2022년 우수논문에 선정됐다고 5일 밝혔다.
IEEE TSM은 반도체 운영 관련 국제 저널, 한 해 게재된 논문 중 편집장들의 추천을 통해 총 5편의 우수한 논문들을 선정해 이듬해 6월에 발표한다.
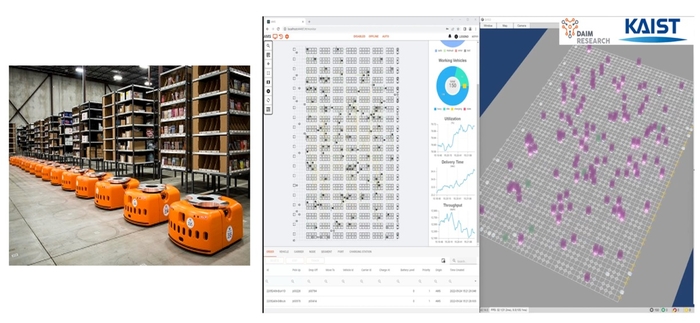
장영재 교수 연구팀(제1 저자 홍상표 박사, 제2 저자 황일회 박사, 제3 저자-교신저자 장영재 교수)이 수행한 연구는 공장 내 1000대 이상의 군집 로봇을 제어하는 기술이다.
반도체 공장이 점차 대형화되고 제조 공정이 복잡해짐에 따라 공장 내 운영하는 로봇의 대수도 함께 늘어나고 있는 상황이다. 장영재 교수 연구팀은 공장 운영의 효율성을 개선하기 위해 1000대 이상의 물류반송 로봇을 인공지능과 디지털 트윈 기술을 활용해 제어하는 기술을 개발해 본 논문에 방법론을 공개했다.
연구팀은 본 연구를 통해 사람의 개입 없이도 로봇이 이상 상황을 스스로 판단해 자율적으로 작업할당 및 운영을 최적화하는 '자율 생산 시스템' 개념을 정립하고 그 가능성을 입증했다.
논문의 저자로 주저자 및 제2 저자인 홍상표 박사와 황일회 박사는 장영재 교수 연구실 출신으로 장 교수와 함께 '다임리서치'라는 연구소기업을 창업하여 관련 연구를 사업화했다.
연구팀은 이번 연구를 기반으로 한 소프트웨어를 개발해 글로벌 반도체 업체에 관련 솔루션을 공급하고 있으며 최근에는 포스코 DX와 협업하여 해당 기술을 철강, 2차전지 소재 관련 공장 내 로봇 운영에도 확대 중이다.
김영준 기자 kyj85@etnews.com

