






나뭇잎 모양처럼 본체를 접어 공중을 비행하는 측량 로봇이 개발됐다. 배터리를 사용하지 않으면서도 상승과 하강을 할 수 있어 환경이나 대기를 조사하는 작업에 용이해 보인다.
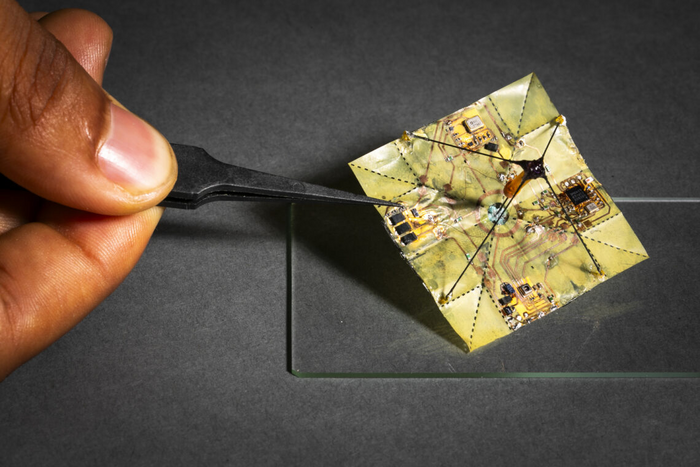
미국 워싱턴대 연구팀이 개발한 '마이크로 플라이어'는 언뜻 보기에 나뭇잎이나 작은 종이처럼 보이지만 엄연히 작동하는 초소형 로봇이다.
이 로봇의 무게는 약 400㎎로, 금속 못 한 개 무게의 50% 정도에 불과하다. 40미터 높이에서 떨어뜨렸을 때 약 90미터까지 이동할 수 있는 것으로 알려졌다.
연구팀은 나뭇잎에서 발견되는 기하학적 패턴에 기반한 '미우라-오리 종이접기' 패턴에서 아이디어를 얻었다. 펼쳐진 상태에서는 느릅나무 잎처럼 바람에 혼란스럽게 흔들리지만, 접힌 상황에서는 단풍잎이 떨어지듯이 안정적으로 떨어지도록 했다. 공중에서 표면적을 바꿔 낙하 에너지를 이동 에너지로 전환하는 원리다.
로봇은 배터리를 사용하지 않는다. 태양 에너지를 기반으로 형태에 변화를 줘 원하는 위치로 이동한다. 구체적인 작동 방식은 이렇다. 처음에는 드론을 통해 나뭇잎 로봇을 투하한다. 투하된 로봇은 펼쳐진 채로 바람에 따라 흔들리면서 위치를 바꾼다. 적절한 위치에 도달한 뒤에는 접혀진 모양으로 형태를 바꾼다. 그 자리에 안정적으로 착지하기 위해서다. 온보드 압력센서가 높이를 측정하고 타이머나 블루투스 신호를 통해 날개를 접도록 명령을 내린다.
로봇의 용도는 공중을 날아다니면서 대기 및 환경을 측정하는 것이다. 마이크로 플라이어는 가볍지만 온도, 습도, 압력, 고도 등 다양한 측정 센서를 탑재할 수 있게 견고하게 설계됐다는 게 연구팀의 설명이다.
드론보다 저렴하고 투하할 때를 제외하면 별도의 에너지 없이 사람이 가기 힘든 곳을 갈 수 있다는 게 장점이다. 구체적으로 산불을 추적해 화재 발생 위치와 진압을 위해 물을 투입할 위치를 결정할 때 사용될 수 있다. 이외에도 대기 중 오염물질의 이동 경로 추적 등 다양한 응용 분야에서 데이터를 확보할 수 있다.

김영호 기자 lloydmind@etnews.com

