






대구경북과학기술원(DGIST·총장 국양)은 이상훈 로봇및기계전자공학과 교수팀이 무감각성 표면 근전도 센서를 개발했다고 8일 밝혔다.
연구팀이 개발한 센서는 하지절단 환자의 의도에 맞게 로봇 의족을 제어할 수 있는 중요 장치다. 향후 절단환자의 의도를 반영한 로봇 의족 구동으로 재활 및 삶의 질 향상에 크게 기여할 것으로 기대된다.

로봇 의족 개발을 위해 가장 중요한 사항은 절단 환자의 의도에 맞게 하지기능이 안정적으로 구현돼야 한다. 환자의 생체신호를 신속하고 정확하게 획득할 수 있어야 한다. 가장 적합한 방법으로 비침습적인 표면근전도 센서를 활용하는 방법이 있지만, 실제로 활용하기는 어렵다.
근전도 신호기록을 위해서는 센서가 소켓 내부 실리콘 라이너 안에 위치해야 하는데, 실리콘 라이너의 매우 좁고 습한 환경, 로봇 의족 무게와 함께 역동적인 움직임이 강하게 전달되는 소켓의 영향으로 센서 손상 없이 장기간 동안 근육 생체신호를 안정적으로 기록할 수 없기 때문이다.
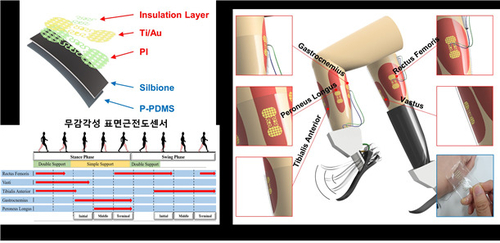
연구팀은 미세 전자제어 기술을 통해 형성되는 생체인터페이스인 '무감각성 표면 근전도 센서'를 개발했다. 이번 센서는 서펜타인 구조를 모방해 유연성과 신축성을 지님과 동시에 통기성과 접착성을 확보, 다양한 절단환자의 환부에 적용해 장기간 반복적으로 사용할 수 있다.
검증을 위해 하지 절단환자에게 무감각성 표면 근전도센서를 부착한 후 근육 신호기록을 통한 소자 기능성 평가를 진행했다. 그 결과 다양한 환경(평지, 경사면, 계단)에서 보행하는 절단환자의 근육 신호를 고품질로 실시간 획득하는 데 성공했다.
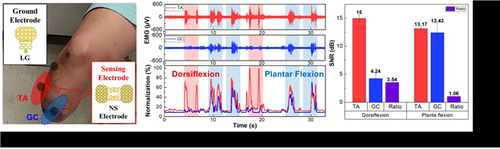
또 절단 환자의 발바닥·발등굽힘 운동에서 발생한 근육신호를 분석해 무감각성 표면 근전도 센서의 선택적 신호 획득성능이 상업용 표면 근전도 센서보다 뛰어남을 확인했다. 신체신호를 활용한 로봇 의족 및 로봇 의수의 정밀제어 외에도 다양한 웨어러블 응용 기술에도 활용될 수 있을 전망이다.
이번 연구는 범부처전주기의료기기개발사업단의 '양측 하지 절단환자 적용 가능한 스마트 전자제어식 하지의지 제품 및 핵심부품 국산화 개발' 과제 지원을 통해 서울아산병원 성형외과팀, 휴고다이나믹스, DGIST가 함께 수행했다. 연구결과는 최근 재료과학 및 융합연구 분야 학술지 'npj 플렉서블 일렉트로닉스'에 게재됐다.
대구=정재훈 기자 jhoon@etnews.com

