






한국전자통신연구원(ETRI)이 전문가 프로그래밍 없이 일반 사용자도 로봇을 이용해 속도, 가속도, 접촉력 등 제어가 필요한 고난이도 작업을 수행할 수 있게 했다. 향후 중소·중견 제조업체 생산성 향상과 산업 자동화에 큰 도움이 될 전망이다.
다관절 로봇 매니퓰레이터(물체 조작 기계장치)처럼 인간 팔과 유사한 동작을 제공하는 로봇 팔을 비전문가도 쉽게 활용할 수 있게 됐다. 로봇 움직임을 만드는 복잡한 교육이나 학습도 필요 없게 됐다.
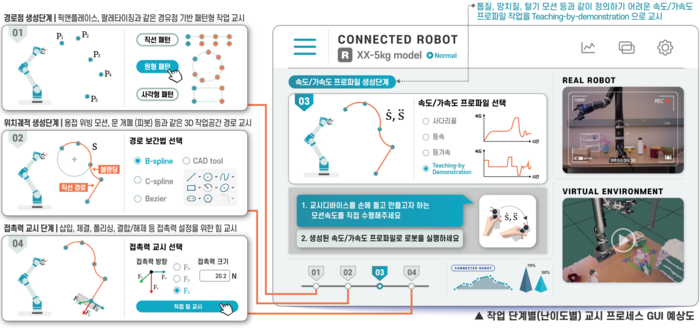
개발 기술은 로봇 티칭용 애플리케이션(앱)인 위자드와 연동되는 휴대용 티칭 기기를 사용한다.
기존 몇 주에서 몇 달간 개발 기간이 소요되는 로봇 작업을 최초 사용자도 단 몇 분 만에 개발할 수 있다. 로봇의 티칭 결과가 만족스럽지 않거나 도중에 오류가 발생해도 얼마든지 다시 티칭할 수 있는 유연성을 제공한다.
ETRI는 이 기술을 기반으로 경북 포항시 흥해읍 뉴로메카 포항지사 테스트베드에서 로봇 연마공정(샌딩) 작업을 시연했다.
작업하고자 하는 위치를 공간상 네 개 점만 지정해 주면 경로를 일일이 알려주지 않아도 연마할 면을 찾아 작업을 진행했다.
로봇이 표면 수직 방향으로 제어하는 힘을 10~30뉴턴(N) 범위에서 닦을 때 목표값 90% 이상 성능으로 유지하면서 샌딩 작업에 성공할 수 있었다. 목표값을 크게 벗어나지 않았다.
연구진은 이 기술을 위치 제어만 가능한 산업용 로봇에도 엔드툴 위치에 힘·토크 센서를 연결해, 적용 가능하다고 설명했다.
사람-로봇 인터페이스 기술뿐만 아니라 로봇이 접촉력을 유지하면서 동시에 위치를 이동하는 복합제어 기술, 센서 측정값을 기반으로 접촉면 수직 방향을 실시간 자동 인식해 자세를 제어하는 기술 등이 집적된 결과다.
개발 로봇 티칭 기술은 샌딩 작업 이외에 문 열기·닫기, 부품 체결·분리 등 작업에도 적용됐다. 향후 스마트 공장 등 공정 설비에 적용할 수 있어 개발시간을 크게 줄일 전망이다.
ETRI는 계명대 사용성평가연구센터, 미국 조지아텍에서 일반 사용자 연구를 진행한 결과를 바탕으로 위자드 활용성·적용 분야를 계속 확대할 방침이다.
강동엽 ETRI 로봇IT융합연구실 책임연구원은 “현재 모바일 매니퓰레이터 로봇 작업 티칭 연구가 진행 중이고 향후 양팔 로봇, 4족보행 로봇 등 다양한 형태 로봇에 대한 티칭 및 제어 기술을 개발할 계획”이라고 말했다.
ETRI는 로봇 티칭·제어 기술 개발 및 뉴로메카, 포스텍과 공동연구를 통해 개발한 요소기술을 바탕으로 국제 학술지 등에 9편의 논문을 게재·발표했으며, 6건의 국내·외 특허를 출원 및 등록했다.
김영준 기자 kyj85@etnews.com

