






다양한 재활치료에 활용되는 웨어러블 로봇을 착용자 땀·각질 등에 장기간 영향받지 않고, 안정적으로 제어하도록 도와주는 근전도 센서 기술이 개발됐다.
한국과학기술원(KAIST·총장 이광형)은 정재웅 전기 및 전자공학부 교수, 김정 기계공학과 교수팀이 고품질 전기 생리 신호 측정이 가능한 신축·접착성 마이크로니들 센서 개발에 성공했다고 23일 밝혔다.
재활치료 활용 웨어러블 로봇이 사람의 움직임 의도를 인식하려면 근전도를 정확하게 측정하는 웨어러블 전기 생리 센서가 필요하다.
하지만 기존 센서는 시간이 흐를수록 신호 품질이 떨어지거나, 털·각질·땀 등의 영향을 많이 받는다. 피부보다 단단한 탓에, 피부 변형을 따라갈 수 없어 노이즈(신호 잡음)를 발생시킬 수도 있다. 장시간 신뢰성 높은 웨어러블 로봇 제어가 어렵다.
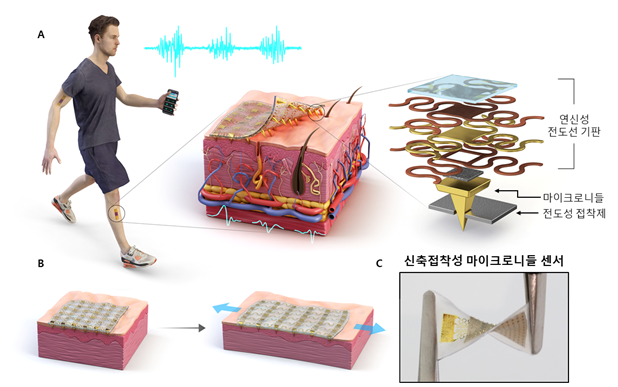
개발 기술은 잘 늘어나는 접착성의 전도성 기판에 피부 각질층을 통과할 수 있는 마이크로니들 어레이를 집적한 것이다.
땀, 각질 등을 제거하지 않아도 착용자 피부 상태 변화에 상관없이 웨어러블 로봇을 안정적으로 제어할 수 있다.
연구팀은 부드러운 실리콘 중합체 기판을 활용해 마이크로니들을 집적, 신축·접착성 마이크로니들 센서를 제작했다. 단단한 마이크로니들이 피부 각질층을 투과해 피부 접촉 저항을 효과적으로 낮춰 털, 각질, 땀, 이물질로 피부가 오염돼도 고품질 전기 생리 신호를 얻을 수 있다.
부드러운 전도성 접착 기판은 피부가 늘어나고 줄어드는 변화에 순응해, 불편감을 주지 않는다. 동작 잡음도 최소화할 수 있다.
연구팀은 마이크로니들 센서 패치를 사용했을 때 웨어러블 로봇이 근전도 센싱 기반 동작 의도 인식을 효과적으로 함을 확인했다.
정재웅 교수는 “개발 센서는 피부 상태에 영향받지 않는 안정적인 근전도 센싱으로 더욱 정확하고 안정적인 웨어러블 로봇 제어를 가능하게 해, 환자 재활을 더 용이하게 할 것”이라고 말했다.
김희수, 이주현 KAIST 전기 및 전자공학부 박사과정 학생이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 '사이언스 어드밴시스' 17일자에 게재됐다.
김영준 기자 kyj85@etnews.com

