






바퀴 강성을 실시간 변화시켜 계단·바위 등 다양한 장애물을 극복할 수 있는 휠, 이동체 로봇 기술이 세계 최초로 개발됐다. 모든 이동체에 폭넓게 적용될 전망이다.
한국기계연구원(원장 류석현)은 액체 방울 표면장력 원리를 모사해 강성이 자유롭게 변하는 모핑 휠을 세계 최초로 개발하고, 실제 이동체에 적용했다고 2일 밝혔다.
기계연 AI로봇연구소(소장 박찬훈) 첨단로봇연구센터의 송성혁 책임연구원, 박동일 센터장팀이 개발했다.
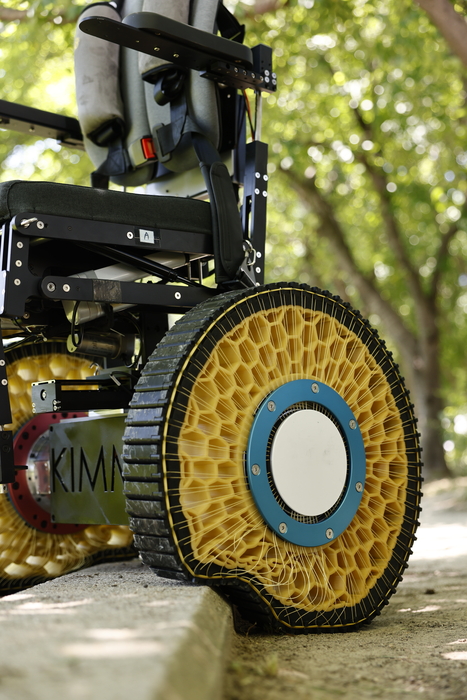
비공기압 타이어처럼 휠 내부를 유연 구조체로 구성하는 기술은 기존에도 있었는데, 평지에서도 휠에 큰 변형이 지속 발생해 주행 효율·안정성이 낮아지고 소음도 크다. 반면 기계연의 모핑 휠은 고속 평지 주행 시에는 강성을 유지하다가 장애물이 있는 경우에만 실시간으로 말랑해진다.
스마트 체인 블록과 유연 구조체로 구성돼 있다. 최외곽은 스마트 체인 블록으로 구성되며, 이것의 표면장력을 제어하는 와이어 스포크(바퀴살)가 휠 허브(중심) 구조와 연결돼 있다.
와이어 스포크로 블록들을 안쪽으로 당기면, 마치 액체 방울의 표면장력이 높을 때 최외곽 분자 간 인력이 큰 것과 같은 효과가 발생한다. 안정적으로 원형을 유지한다. 반대로 와이어 스포크 구조가 느슨해지면 낮은 강성으로 변화한다.
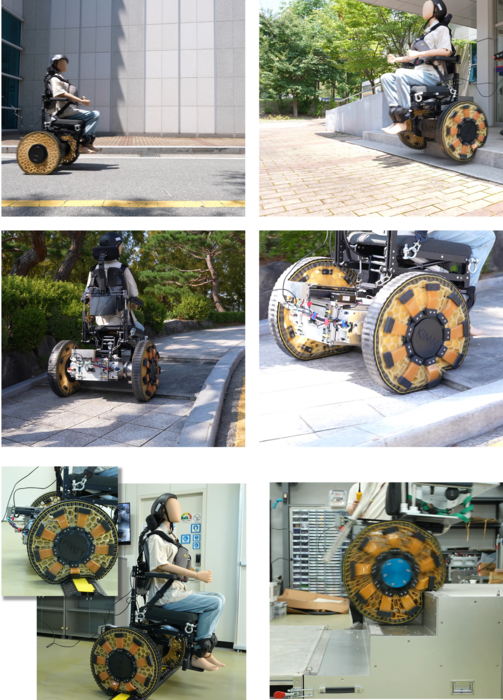
연구팀은 지난해 10월 메커니즘 검증을 완료했으며, 최근 모듈화 기술을 개발해 다양한 이동체 시스템에 적용했다.
투휠 기반 휠체어 시스템은 바위나 18㎝ 높이 계단을 극복할 수 있다. 4륜 기반 이동체에도 적용한 결과, 휠 반경 1.3배 높이 장애물까지 극복할 수 있었다.

송성혁 책임연구원은 “모핑 휠은 기존 휠의 장점인 높은 이동 효율은 유지하면서 한계점이던 장애물 극복까지 가능하다는 점에서 의의가 있다”고 설명했다.
박동일 센터장은 “표면장력 모사 휠 기술은 기존 장애물 극복을 위한 족형 로봇 및 휠 클러스터 등 복잡한 기계 장치의 한계를 극복할 수 있는 기술”이라며 “향후 장애물 극복이 가능한 휠체어 및 다양한 이동 로봇, 탑승형 운송 수단 등에 활용될 것”이라고 말했다.
이번 연구는 사이언스 자매지인 사이언스 로보틱스 8월호 표지논문으로 게재됐다. 기계연 기본사업 '하지 장애인 독립생활 지원 로봇' 과제 지원을 받아 수행됐다.
김영준 기자 kyj85@etnews.com

