






광주과학기술원(GIST·총장 임기철)은 최영재 신소재공학과 교수팀이 발광다이오드(LED)를 이용한 자외선(UV)과 가시광선으로 원하는 모양의 변형·반복 재구성이 가능한 마이크로 수화젤을 개발했다고 5일 밝혔다.
물과 상호 작용해 부피가 늘어나는 고분자 물질인 수화젤(하이드로젤)은 빛과 온도, 수소이온농도(pH)와 같은 외부 자극과 환경에 반응하여 부피가 변하는 등 모양의 변화를 조절할 수 있다. 기존 모양 변형 수화젤은 서로 다른 반응 특성을 갖는 여러 재료를 결합하여 구성하는 방식으로 제작했으나 위치, 방향, 정도 등 단일 모양으로 고정돼 다채로운 변형이 어렵다는 한계가 있었다.
또한 온도나 pH에 반응하는 수화젤을 사용할 경우, 변형 및 온도 유지를 위해 에너지를 지속적으로 주입해야 하며 모양을 원래 상태로 되돌리기 위해서는 용액을 교체하여 pH를 변화시키는 과정이 필요하다.

연구팀은 이러한 한계를 극복하고 문제점을 해결하기 위해 광반응성 마이크로 수화젤을 개발했다. 패턴화된 빛을 이용해 원하는 영역에서의 팽창·수축 조절을 통해 자유롭게 모양 변형이 가능하다.
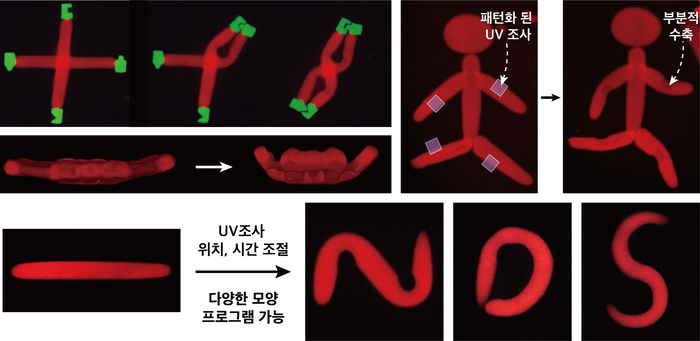
특히 연구에 사용한 DNA 가교제는 광반응성 이성질체인 아조벤젠을 포함하고 있어 빛의 파장에 따라 DNA의 결합과 분리를 조절할 수 있다. 마스크리스 리소그래피 시스템으로 패턴화된 빛을 쪼이면 광반응성 DNA 가교제의 길이를 특정 영역에서 선택적으로 조절할 수 있다. 막대 모양 수화젤의 특정 영역에 패턴화된 UV를 조사하면 해당 영역이 수축하고 주변 영역과의 팽창률 차이로 인해 수화젤이 구부러지게 된다.
연구팀은 UV 조사 위치와 시간 조절을 통해 구부러짐을 프로그래밍해 로봇의 정밀한 동작을 구현하는 데 성공했다. 새로 개발한 수화젤을 활용해 만들어진 로봇 팔은 마이크로 사이즈의 퍼즐을 움직여 맞추고, 물체를 잡는 등 마이크로 로봇 동작을 구현해 정밀한 작업에 활용할 수 있다.
최영재 교수는 “이번 연구 성과를 통해 복잡한 구조와 추가적인 자극 없이 광 반응성 DNA 가교제와 빛으로 수화젤 로봇을 프로그래밍할 수 있다는 것을 확인했다”며 “향후 DNA 디자인을 통한 반응 메커니즘 다양화를 통해 알고리즘처럼 작동해 고도화된 변형을 보일 수 있는 수화젤 로봇 개발이 가능할 것으로 기대한다”고 말했다.
광주=김한식 기자 hskim@etnews.com

