






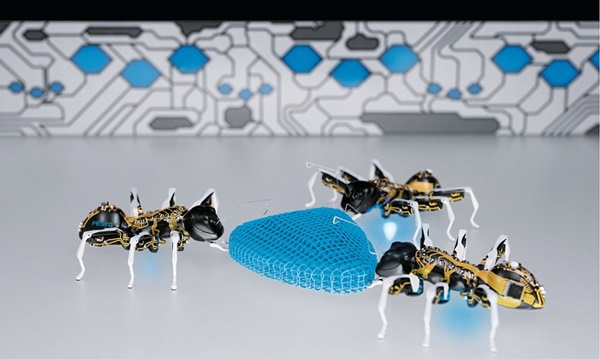
실제 개미처럼 서로 힘을 합쳐 물건을 날라 주는 로봇개미가 등장했다. 미래의 공장에서 사람일손을 대신할 용도로 개발됐다.
뉴사이언티스트는 27일 독일의 페스토가 스스로 판단하기도 하고 협업하기도 하는 로봇개미를 개발했다고 보도했다. 이 개미는 다음 달 독일 하노버 메세에서 로봇나비,로봇 카멜레온과 함께 공개될 예정이다.
사람 손바닥 크기인 이 로봇개미는 플라스틱과 금속,세라믹소재 등으로 만들어졌다. 눈엔 2개의 소형 카메라, 어깨엔 7.2볼트의 전지가, 배엔 위치추적용 GPS수신기가 달려있다. 등쪽에 이 로봇을 움직이는 전자회로 기판이 붙어있다. 톱니바퀴모양의 발은 압력센서와 세라믹소재로 만들어져 물건을 집을 수 있다.
페스토연구원들은 실제 개미처럼 협업능력을 갖추고 물건을 나르는 이들 개미로봇이 언젠가는 공장에서 인간을 대신해 일하게 될 것이라고 말하고 있다.
■인간대신해 공장에서 일할 협업 개미로봇
이 로봇개미들은 몸속의 센서를 이용해 주변의 로봇개미 동료들을 인식하고 무선으로 협업활동을 위한 교신을 할 수 있다.
잉그 하인리히 프로테크 페스토박사는 "자연의 개미처럼 이 바이오닉개미또한 분명한 규칙아래 롤모델을 가지고 있다. 이 개미로봇들은 스스로 자율적인 결정을 내리지만 이를 수행하는데 있어서는 항상 공통의 목적에 따른다. 따라서 협업할 때에는 자신이 맡은 일을 통해 목적하는 일이 이뤄지도록 한다"고 말했다.
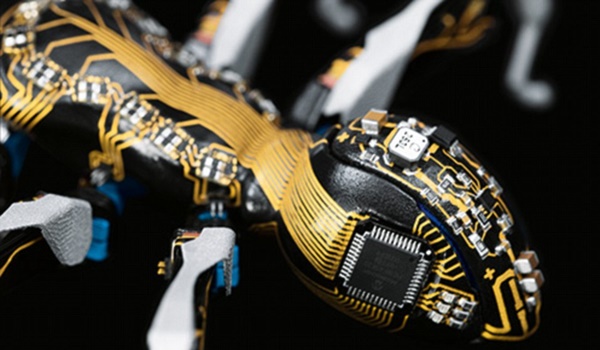
이 개미로봇의 몸체는 3D프린터로 만든 플라스틱과 전자회로 기판으로 이뤄져 있다.
이들의 다리와 끝부분은 세라믹 액추에이터로 돼 있어 적은 에너지만으로도 정확히 구부릴 수 있다.
이 프로젝트의 목적은 공장에서 일하는 지능적인 로봇을 만들어 인간대신 제품을 만드는 일을 하도록 하기 위한 것이다. 이는 그리 멀지 않은 일이 될 전망이다.
실제로 인터넷상거래 회사 아마존은 이미 1만5천대의 로봇을 사용해 물건을 나르게 하고 있다.
아마존이 사용하는 로봇들은 인간과 함께 일하지도 않고, 개미처럼 귀엽지도 않지만 고객들이 주문한 무거운 제품들을 아마존의 포장담당 직원들에게 날라준다.
■드론 비행중 충돌 막아주는 자율비행형 나비로봇기술도 등장
페스토는 하노버 메세에서 로봇개미와 함께 초경량카메라,지능형가이드시스템을 사용해 비행중 물체에 부딪치지 않는 자율비행형 이모션나비(eMotion Butterflies)로봇도 소개한다.
이 나비로봇은 실내 GPS기술을 사용해 자율비행을 한다. 실내에 설치된 10대의 카메라는 적외선 마커를 사용해 나비의 비행을 기록한다.


이들은 나비의 위치데이터를 컴퓨터로 전송해 나비로봇들이 부딪치지 않고 비행할 수 있도록 협업하게 된다.
지능형네트워크 시스템은 로봇나비가 서로 부딪치지 않도록 모니터링하고 안내하도록 해 준다. 이 기술은 미래의 공장에서 사용될 드론들이 서로 부딪치지 않도록 해 주게 될 전망이다.
■카멜레온처럼 물체를 낚아채는 기계도 등장
페스토는 카멜레온에서 착상한 플렉스셰이프그리퍼(FlexShapeGripper)라는 카멜레온형 기계도 개발했다.
이 기계는 카멜레온이 혀로 먹이를 빨아들이는데서 착안해 설계한 것으로 유연한 실리콘형태의 캡(사진아래 파란부분)을 사용해 공이나 베어링 같은 물체들도 흡입하듯이 빨아들여 다른 쪽으로 옮겨 준다.
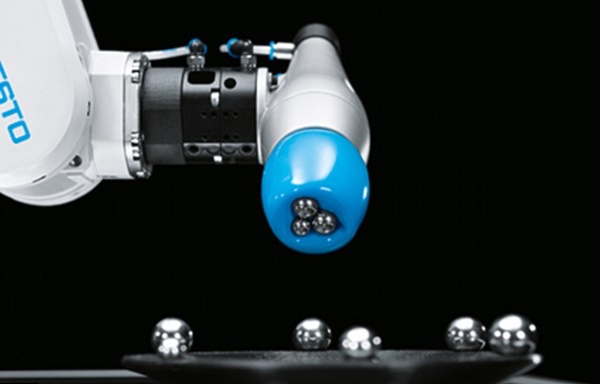
이 기계는 외형상으로는 카멜레온을 닮지 않았지만 생산라인에서 특별한 형태를 갖추지 않은 물건을 집을 때 아주 유용하게 사용될 것으로 보인다.
전자신문인터넷 이재구국제과학전문기자 jklee@etnews.com