






‘바퀴달린 기존 탐사로봇과 달리 스파이크 박힌 정사각형으로 설계돼 어느 면으로 착륙하더라도 즉시 작동할 수 있다. 점프하거나 구르거나 회전하면서 이동한다.’
미항공우주국(NASA)은 6일(현지시각) 외계 어느 천체에 착륙하더라도 안전하게 임무를 수행할 수 있는 고슴도치 로봇을 선보였다.
고슴도치 로봇은 내부 플라이휠에 의해 움직이고 회전하는 스파이크를 장착한 것이특징이다.
◇제자리에서 튀어 오르고, 굴러다니며 지표 온도 측정
이 로봇은 제자리에서 뛰어 오르고, 구르는 기능을 갖고 있다. 화성에서 사용되고 있는 바퀴달린 탐사로봇과 다르다. 고슴도치 로봇 몸에 박힌 스파이크는 낯선 행성이나 혜성같은 천체 토양으로부터 로봇 몸체를 보호해 주며 제자리에서 뛰거나 구를 때(텀블링) 발처럼 작동한다. 스파이크 박힌 열감지 계측기(프로브)는 굴러다니면서 지표면 온도를 측정한다.


나사는 이 로봇이 행성과 소행성을 탐사하는 이상적인 도구가 될 것이라고 말하고 있다. 고슴도치 로봇 프로젝트에는 나사 제트추진연구소(JPL), 스탠퍼드대, 매사추세츠공대(MIT)가 공동 참여했다.
◇혜성, 소행성처럼 낮은 중력의 거친 표면에서도 유연하게 탐사
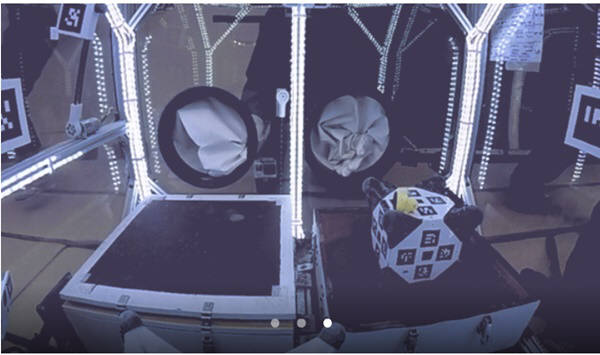
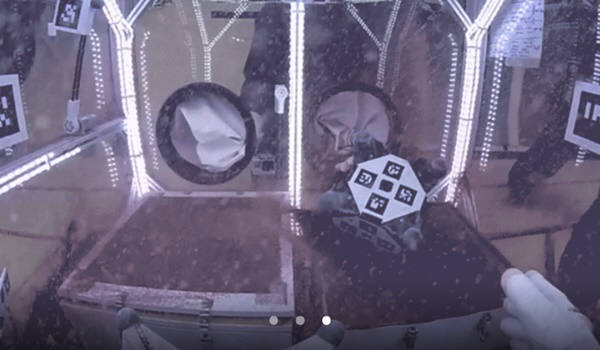
이 고슴도치 로봇은 4번 비행동안에 180회나 포물선을 그리면서 착지해 다양한 형태의 임무수행 능력을 과시했다. 이를 통해 낮은 중력을 가진 작은 천체에서 얼마나 유용하게 작동할 수 있을지를 보여줬다.
연구진은 이같은 고슴도치 임무수행 능력을 모래, 러프, 바위, 미끄럽고 얼음이 언 곳, 부드럽고 부서지기 쉬운 곳 등 다양한 지형에서도 시험했다.
고슴도치 로봇의 가장 간단한 동작은 한 장소에서 방향을 돌리는 이른바 ‘요(yaw)’동작이다. 고슴도치로봇은 스스로 올바른 방향을 잡은 후에는 1~2개의 스파이크를 사용해 제자리에서 긴 거리를 뛰어오르거나 한면에서 다른면으로 면을 회전시켜 짧은 거리를 굴러가게 된다.

JPL의 고슴도치로봇은 8개 스파이크와 3개 플라이휠을 갖고 있다. 연구진은 무게 5kg인 이 시제품에 카메라와 분광계측기까지 장착하면 9kg로 늘어날 것으로 보고 있다. 스탠퍼드대가 만든 시제품은 약간 더 작고 가벼우며, 스파이크도 더 짧다.
스탠퍼드대 연구진을 이끌고 있는 마르코 파본은 “플라이휠을 어떻게 제어해 멈추느냐에 따라 고슴도치 로봇의 뛰어오르는 각도를 다르게 조절할 수 있다”고 말했다. 그는 지난 2011년 네스나스와 함께 2개의 브레이크시스템을 제안했다.
◇NASA, 자율기능 부여작업 추가중
연구진은 현재 고슴도치가 지구에서의 지시를 받지 않고 작동할 수 있는 능력을 높이기 위해 자율주행 기능 부여작업을 하고 있다. 이는 화성 궤도를 도는 위성(MRO)이 화성탐사로봇 큐리오시티와 오퍼튜니티와 교신해 화성탐사 결과 데이터를 지구로 전달시켜 주는 방식과 같다.
궤도를 도는 모선은 또한 로봇이 자신의 위치를 확인하고 탐사하는 것을 돕게 해준다. 고슴도치 로봇은 단순한 구조로 돼 있어 전통적인 탐사로봇에 비해 상대적으로 낮은 비용으로 만들 수 있다. JPL과 스탠퍼드대 고슴도치로봇 실험 과정은 유튜브(https://www.youtube.com/watch?v=bDmoqjNQAu8)에서 확인할 수 있다.
이재구 전자신문인터넷 국제과학전문기자 jklee@etnews.com