






로봇 개발자에게 동물과 작은 곤충이 움직이는 모습은 각종 영감을 주는 원천이다. 몸집에 비해 엄청나게 큰 힘을 내고 눈으로 따라가기 힘든 운동능력을 보여주기 때문이다. 많은 로봇 개발이 동물과 곤충 움직임을 모사해 이뤄지고 있다.
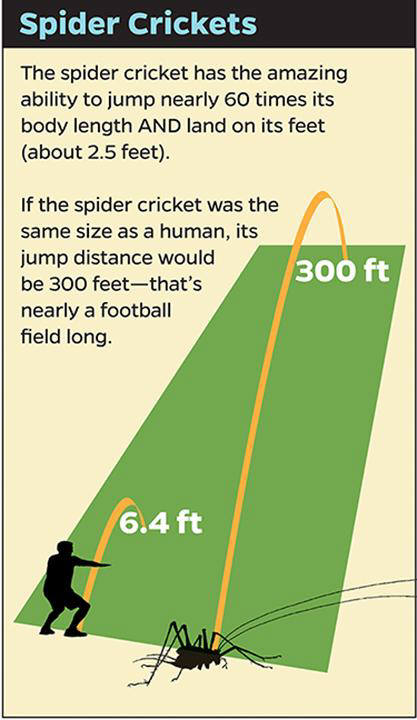
미국 존스 홉킨스대 연구진은 지하실 구석 등에서 찾아볼 수 있는 ‘거미 귀뚜라미(spider cricket)’에 주목했다. 몸통 길이 60배 넘게 뛰는 도약거리와 안정적인 공중 자세, 착륙 패턴 등에 숨은 비밀을 풀어 로봇 개발에 활용하기 위해서다.
거미 귀뚜라미가 도약하는 거리를 사람 기준으로 계산하면 축구장 길이에 상당하는 91.4미터에 달한다. 날개가 없지만 다리를 이용해 공중에서 자세를 제어하고 안전하게 착륙할 수 있다.
연구진은 초당 400프레임을 기록하는 고속 비디오카메라 3대로 거미 귀뚜라미 도약 모습을 관찰했다.
라자트 미탈 존스홉킨스대 기계공학과 교수는 “느린 화면으로 관찰할 때 거미 귀뚜라미 다리 동작은 고전 무용과 신기할 정도로 유사하다”며 “공중에서 자세를 잡기 위해 각 다리가 놀랍도록 섬세하고 복잡하게 움직인다”고 말했다.
이동 거리를 극대화하기 위해 공기역학적인 자세도 취한다. 도약을 시작하며 위로 솟구칠 때 몸통을 발사체처럼 유선형으로 만든다. 도약부터 체공, 착륙까지 다리와 더듬이가 유기적으로 움직이며 안정적으로 무게중심을 조정한다. 착륙 후 바로 도약할 준비를 신속하게 할 수 있도록 다리부터 땅에 닿도록 시도하는 모습도 보인다.
촬영한 거미 귀뚜라미 동작은 컴퓨터로 옮겨져 몸통 각 요소와 다리가 도약과 착륙 중 어떻게 움직이는지 3D모델링으로 변환된다. 모델링을 기초로 거미 귀뚜라미가 도약하는 동작을 모사하는 로봇 개발에 나설 계획이다.
연구진은 곤충 모사 로봇이 울퉁불퉁하고 바위투성이인 땅을 탐사하거나 지진 등 재난 상황 직후에 생존자를 수색하는 데 활용도가 높을 것으로 내다봤다. 거미 귀뚜라미뿐만 아니라 애벌레와 개미, 벌새 등 다양한 곤충과 동물 모습을 따라한 로봇이 사람이 수행하기 어려운 다양한 임무 현장에서 활약할 것이란 기대다.
박정은기자 jepark@etnews.com

