






우리나라를 대표하는 휴머노이드 로봇 `휴보`에 인공지능(AI)을 탑재하고 운동 성능을 대폭 강화한다. 미국 첨단 로봇 `아틀라스`를 따라잡는 것이 목표다.
한국과학기술원(KAIST)은 앞으로 5년 동안 총 150억원을 투입해 한국전기연구원, 국민대 등과 함께 `휴보`에 딥러닝 기술을 활용해 반복 학습하도록 하는 AI 기능을 더하고 하드웨어(HW) 성능을 강화하는 업그레이드 연구에 나선다.
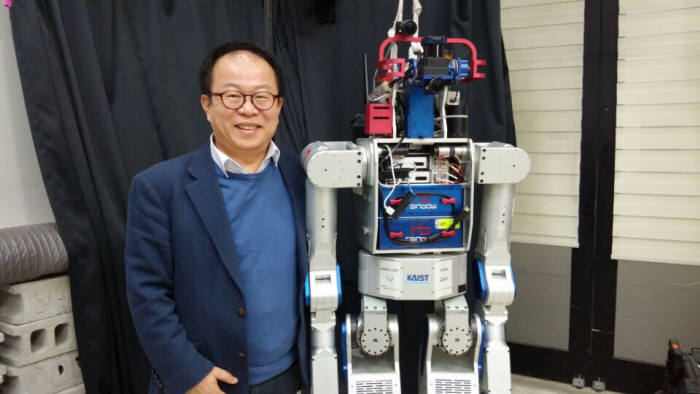
오준호 KAIST 휴머노이드 로봇 연구센터 소장은 1일 “산업통상자원부가 5년 동안 150억원을 지원하기로 했다”면서 “성능을 대폭 강화한 업그레이드 버전 `휴보`를 개발할 계획”이라고 밝혔다.
휴보는 오 소장 연구팀이 2002년부터 독자 개발한 휴머노이드 로봇이다. 2002년 8월 처음 로봇 몸체(KHR-1)를 만든 이후 현재 `DRC 휴보II` 버전까지 개발했다. 2015년에는 세계재난로봇대회(DRC)에서 밸브 잠그기, 장애물 넘기 등 8개 과제를 가장 빠른 시간인 44분 28초에 완수하면서 우승했다.
연구팀은 우선 AI를 탑재해 하나의 명령만으로 복합 임무를 수행할 수 있도록 할 계획이다. 휴보는 그동안 개별 명령을 모두 프로그램 해 줘야 임무를 수행했다. 특정 장소로 이동시키려면 이동 지점과 방향 등 조건을 수시로 입력해야 했다.
올해부터는 딥러닝 기술을 적극 활용, 이 같은 불편함을 없앤다. 사물이나 장애물이 될 수 있는 환경 정보 등을 반복 학습, 스스로 대응 방안을 찾게 한다. 1차 목표는 지난 DRC 대회 과제를 자세한 명령 없이 수행할 수 있도록 하는 것이다.
로봇 HW 성능도 강화한다. 무릎 구동 부위의 순간 출력을 800W에서 1.5㎾까지 높이는 등 출력을 2~3배 높여서 이동 속도를 향상시킨다. 출력이 강한 유압시스템 구동장치를 적용할 예정이다. 기존 휴보는 전기 구동 방식으로만 구동, 힘이 약했다.
안정성과 신뢰성 확보 작업도 함께 추진한다. 부품을 소형화·단순화·모듈화해 잔 고장을 없애고, 발 헛디딤이나 급경사에도 0.3초 이내에 반응해 넘어지지 않게 할 계획이다. 로봇 구동 소프트웨어(OS)는 오픈소스로 만들 방침이다.
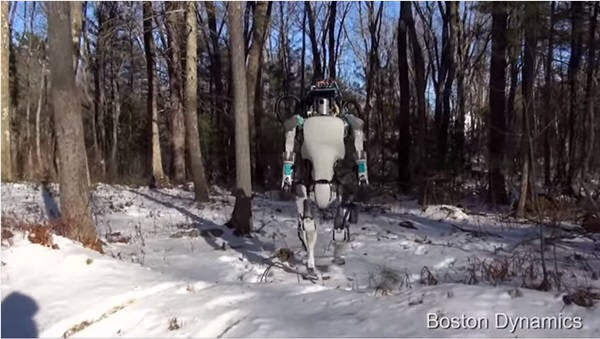
KAIST는 이 같은 연구로 `휴보`를 미국 `아틀라스`보다 뛰어난 AI 로봇으로 업그레이드한다는 목표다. 아틀라스는 보스턴 다이내믹스사가 개발한 휴머노이드 로봇으로 눈밭이나 가파른 경사에서도 빠르게 걷고, 넘어져도 빠르게 일어나 화제가 되고 있다.
오 소장은 “휴머노이드 로봇은 선진국이 자존심을 걸고 연구하는 분야로, 험한 지형에서도 안정되고 자유롭게 걷거나 임무를 수행하는 로봇을 만드는 것이 목표”라면서 “앞으로 2년 이내에 눈에 띄는 성과를 선보이겠다”고 말했다.
대전=김영준기자 kyj85@etnews.com

