






코넬대 연구진이 초소형 자율 보행 로봇을 개발했다. 전자 두뇌를 탑재, 외부에서 움직임을 제어하지 않아도 스스로 걷는다. 미세 수술 등 의학 분야에서 활용될 수 있을 것으로 전망된다.
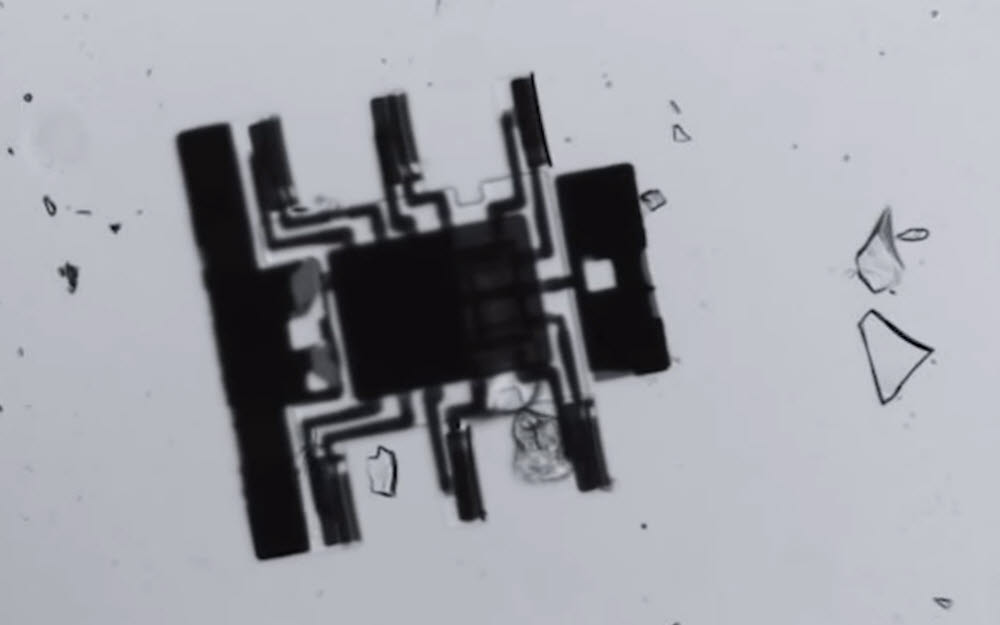
코넬대가 개발한 스마트 마이크로 로봇은 크기가 100~250마이크로미터에 불과하다. 태양광으로 전력을 공급받는다. 상보형 금속산화물 반도체(CMOS) 회로를 두뇌로 삼아 작동한다. 반도체 회로는 1000개 트랜지스터와 다이오드, 저항과 커패시터 등으로 구성됐다. 신호를 통해 로봇 걸음걸이를 제어한다. 일종의 중앙처리장치(CPU) 역할이다. 로봇 다리는 백금 기반의 작동장치를 활용했다. 로봇은 초당 10마이크로미터(㎛) 이상 속도로 움직인다. 코넬 연구진은 작은 박테리아를 추적하거나 몸 속 이물질을 없애고, 미세 수술 등에 로봇을 활용할 수 있을 것으로 내다봤다.
스마트 마이크로 로봇은 우리가 쉽게 보는 로봇과 개발 환경이 다르다. 인간의 몸 속에서 의료용으로 활용할 것을 염두에 두고 만들기 때문이다. 사람 몸 속은 혈액 등 대부분 액체 환경이기 때문에 마이크로 로봇의 운동을 제한한다.
코넬 연구진은 이러한 도전 과제를 해결하기 위해 다양한 기술을 개발해왔다. 2020년에는 실리콘 광전회로를 이용, 두께 5㎛, 너비 40㎛, 길이 40~70㎛의 초소형 로봇을 개발했다. 로봇 다리에 광전기가 연결돼 있는데 이곳에 레이저를 조사하면 로봇이 움직인다. 2021년에는 초음파 변환기를 장착해 음파 공명 주파수를 바꾸는 방식으로 로봇 움직임을 제어하는 기술도 개발했다. 로봇 외부에서 전력을 공급하고 제어하기 위해 와이어, 레이저, 초음파 등을 활용해왔다. 이러한 방식으로 인간 몸 내부에서도 로봇 움직임을 제어하는 방식을 고안했다. 로봇 스스로 움직일 수 있도록 제어 장치를 내부에 적용한 것은 이번이 처음이다.
이타이 코헨 코넬대 교수는 “이전에는 로봇으로부터 특정 종류의 응답을 얻기 위해서는 '끈'을 이용해야했다”며 “하지만 이제는 두뇌를 가지고 있기 때문에 꼭두각시에서 실을 없앤 것과 같다. 피노키오가 의식을 가진 것과 같다”고 말했다.
권동준기자 djkwon@etnews.com

